Ute Modelling Information
Motion Model
We are using an Ackerman Model:
Now,
if we translate our model to the gps and laser point, let us call this point![]() .
.
The
velocity ![]() is
measured with an encoder locate in the back left wheel. This velocity is
translated to the center of the axle with the following equation:
is
measured with an encoder locate in the back left wheel. This velocity is
translated to the center of the axle with the following equation:
For our vehicle:
![]()
Finally the discrete model in global coordinates can be approximated with the following set of equations:
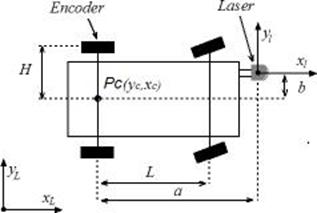
Figure 1: Vehicle kinematics
Observation Model
Observation model for range and bearing sensor:
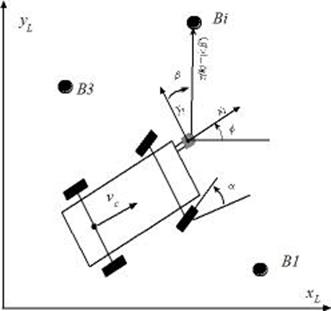
Figure 2: Vehicle and Laser sensor
Appendix A
A.1 Motion Model Jacobians:
A.2 Observation Model Jacobians:
For the Slam case, where the state vector is the vehicle posse and beacons position:
Appendix B
Ute Dimensions:
2 Sensors
2.1 Sensors available in the Ute
Dead Reckoning:
Velocity Encoder and Steering angle
Inertial Measument Unit: 3 accel / 3 gyros / 2 inclinometers ( Watson Unit )
External Sensors:
GPS
Laser
Vision