Multi-sensor identity tracking with Event Graphs
Peter Morton, Bertrand Douillard, James Underwood
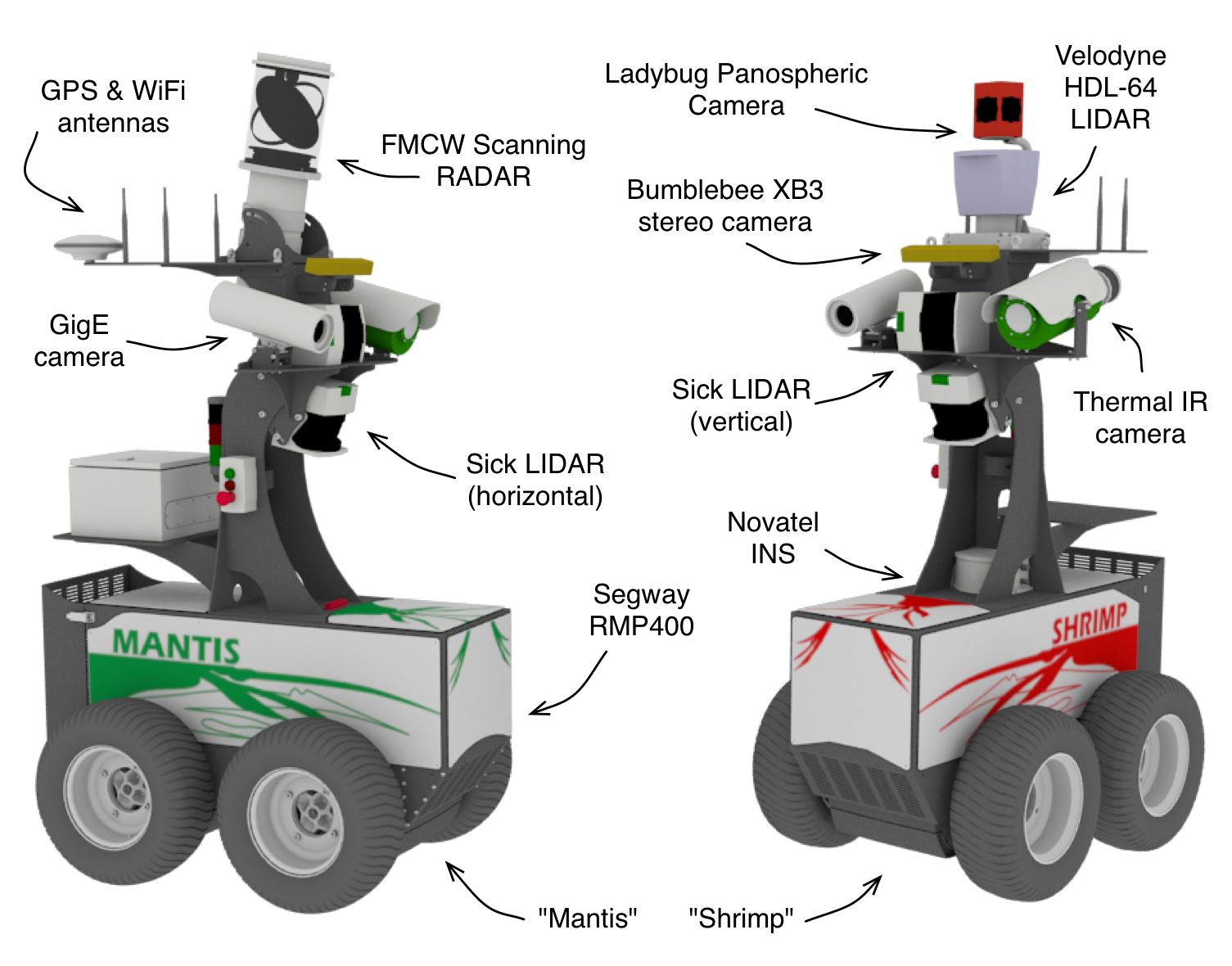
- Segmented Velodyne scans[1] are tracked by associating centroids[2].
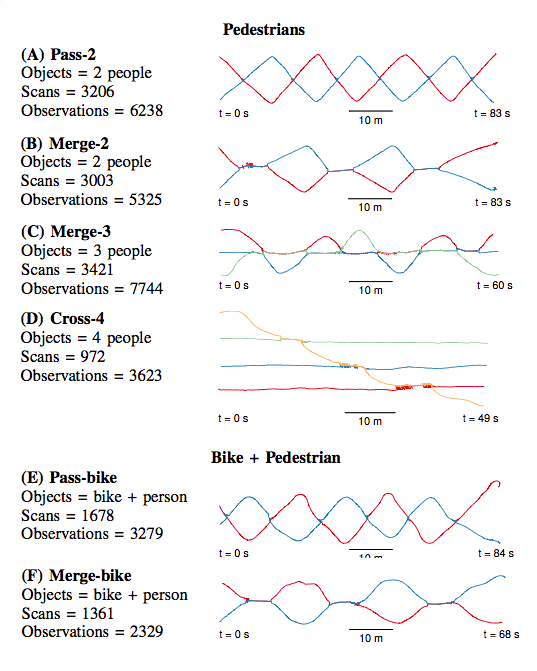
- Identities of tracked objects become ambiguous after interactions.
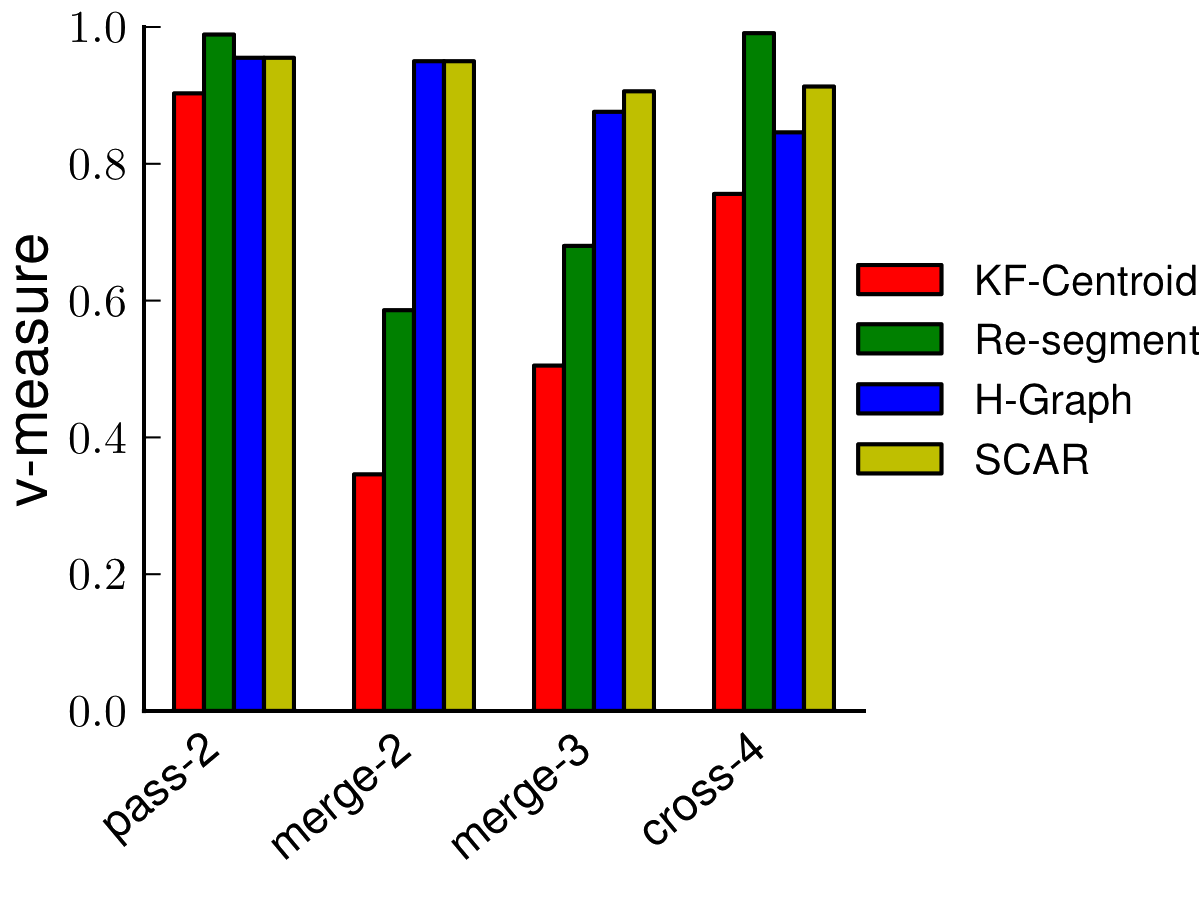
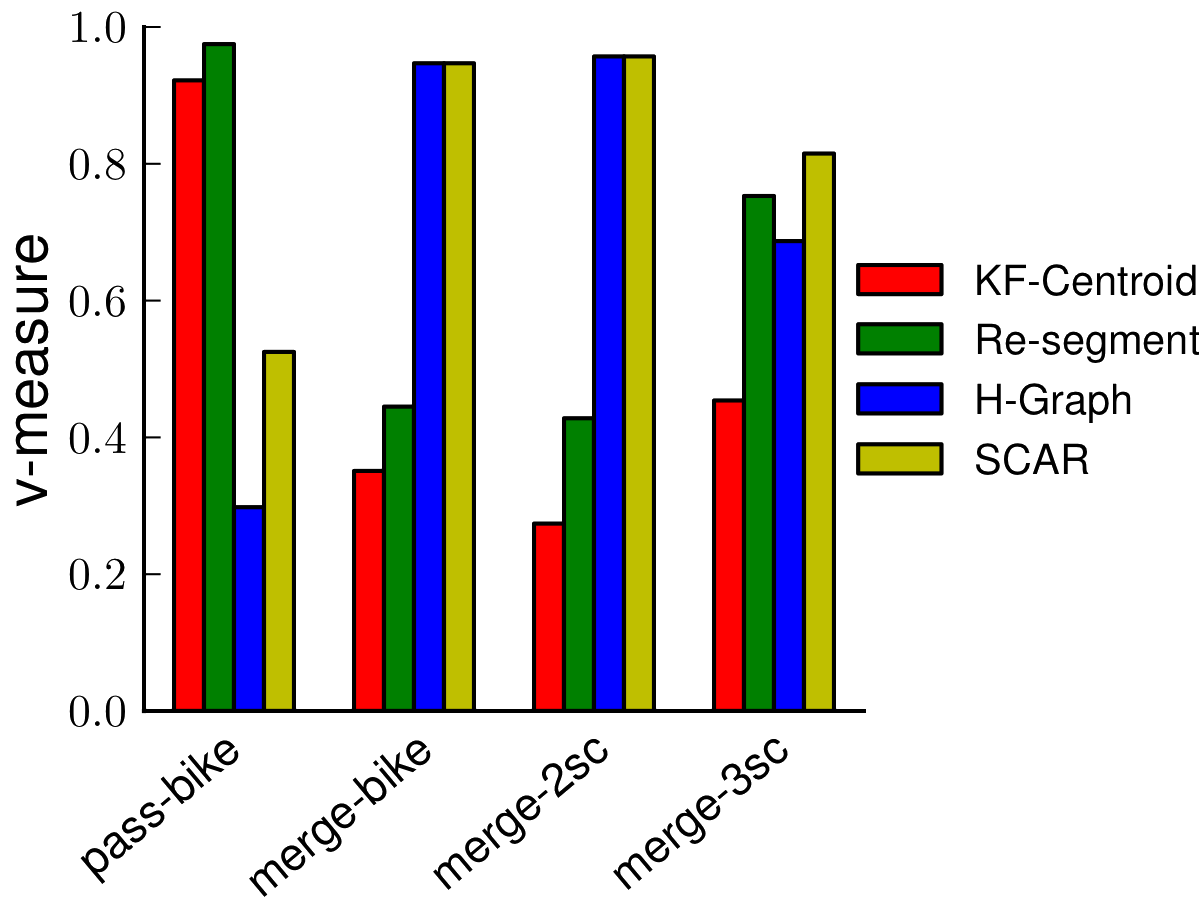
- An Event Graph [3] is built to model the interactions.
- Appearance information (e.g. from camera) is used to resolve the ambiguity.
- Douillard, B., Underwood, J.P., Kuntz, N., Vlaskine, V., Quadros, A., Morton, P. & Frenkel, A. "On the Segmentation of 3D LIDAR Point Clouds", IEEE International Conference on Robotics and Automation, 2011
- Morton, P., Douillard, B. & Underwood, J.P. "An evaluation of dynamic object tracking with 3D LIDAR", Australasian Conference on Robotics and Automation, 2011
- Torabi, A. & Bilodeau, G.-A. "A Multiple Hypothesis Tracking Method with Fragmentation Handling", Canadian Conference on Computer and Robot Vision, 2009