Research
Current Projects
Dr. Monteiro and his group have been working on developing the world's first fully autonomous, remotely operated mine. This is a $21m project funded by Rio Tinto, a global mining company. Research topics include machine learning, robot perception and statistical signal processing.
|

|
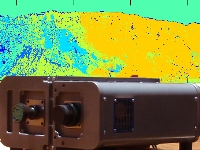
Rock Characterization using Drill Measurements
A variety of mechanical sensors have been installed on an autonomous drill rig to monitor its performance and operation. Research has been conducted on analysing measurement-while-drilling data to gain insight on the relationship between the mechanical measurements and the characteristics of the rocks being drilled. The acquired geological maps can then be used for navigation of other autonomous mining vehicles.
|
|
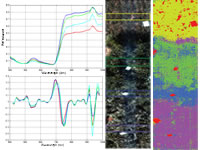
Hyperspectral Analysis of Ore-bearing Rocks
Hyperspectral sensors acquire hundreds of narrow contiguous bands of spectral information over wide areas allowing non-destructive analysis of samples. Research has been conducted on applying hyperspectral imaging to map mineral distribution on the surface of an open-pit mine for robot navigation.
|
| Past Projects |
|
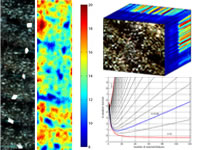
Classification of hyperspectral data to identify grass species (2007)
An artificial neural network method was developed to classify grass species from hyperspectral image data. The hyperspectral dataset was processed using normalization and second derivative in order to reduce the effect of variations in the intensity level of reflectance and to improve the classification accuracy and generalization performance of the ANN-based model.
|
|
Estimating chemical contents in soybean crops using hyperspectral imagery (2005-2006)
This study investigated the prediction of chemical contents in green vegetable soybean (edamame) crops. A neural network-based model was implemented to predict the chemical contents of localized crop fields from hyperspectral data. See paper.
I have proposed a feature extraction method based on particle swarm optimization for hyperspectral imagery analysis. The base Matlab implementation for the PSO feature selection is available. See paper.
|

|
See-through-blood multispectral visualization system (2003-2005)
An image/signal processing algorithm to be used as aiding tool during surgeries was proposed. The images are obtained using a hyperspectral sensor, which provides data from a large number of measured wavelength bands. A neural network approach was implemented to process hyperspectral data from near infrared wavelengths in order to produce a clearer image of blood covered areas. See paper.
|

|
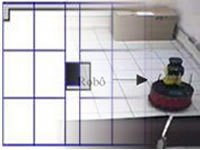
Home robot mapping and navigation (2004)
This work was aimed at developing navigation algorithms for the ApriAlpha Home Robot. Specifically, feature-based and occupancy-grid-based map building algorithms were implemented, and a hybrid mapping approach to allow long-term robot navigation was proposed. This project was a joint collaborative research with the Toshiba's Corporate Research and Development Center under the supervision of Prof. Nobuto Matsuhira, as part of the COE 21st Century Program of the Tokyo Institute of Technology. See paper.
|
|
Reinforcement learning for robot navigation (2001-2002)
The performance of reinforcement learning algorithms in a real mobile robot application was analysed. Several algorithms, Q-learning, Sarsa, and Peng-Williams, were tested in a simple task learning experiment. Also, a cognitive map-learning algorithm that used a neural network for sensor fusion and interpretation was implemented. The maps of the real environment acquired by the robot were then used as test bed for the reinforcement learning experiments. This research was conducted during my master's studies under Prof. C.H.C. Ribeiro. See paper.
|

Home | Publications | Research | Teaching | People | About me | Contact
|