research projects
This section shows a summary of the main areas of my research during the last years.
(Last updated May 2012)
multi-modal sensor calibration
This is the main topic of Zachary Taylor’s thesis. The main objective is to develop algorithms for automatic registration of different sensor modalities.
- Click here for our youtube movie
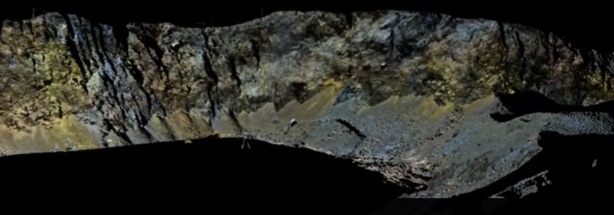
Automated registration of Riegl laser and hyperspectral camera in an open-pit mine.
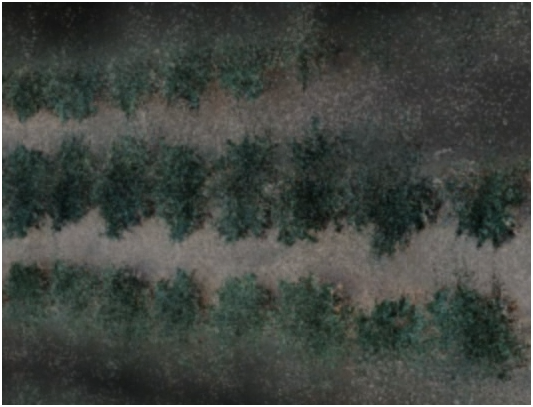
Automated registration of Velodyne laser and Ladybug camera in an almond orchard.
SLAM
I’ve done a lot of work in SLAM in the past and although I still work in SLAM, I’m not doing so much as before. The next papers summarise my work.
Consistency of EKF SLAM
-T. Bailey, J. Nieto, J. Guivant, M. Stevens and E. Nebot. ‘An investigation of EKF-SLAM Consistency’. IEEE IROS, International Conference on Intelligent Robots and Systems, 2006.
FastSLAM
-J. Nieto, J. Guivant, E. Nebot and S. Thrun. ‘Real Time Data Association for FastSLAM’. In Proceedings IEEE ICRA, International Conference on Robotics and Automation, 2003. Taipei, Taiwan.
-T. Bailey, J. Nieto, and E. Nebot. ‘Consistency of the FastSLAM algorithm’. In Proceedings IEEE ICRA, International Conference on Robotics and Automation, 2006.
DenseSLAM
-J. Nieto, J. Guivant and E. Nebot. ‘DenseSLAM: Simultaneous Localisation and Dense Mapping’. The International Journal of Robotics Research Vol. 25, No. 8, August 2006, pp. 711-744.
Scan matching based SLAM
-J. Nieto, T. Bailey and E. Nebot. ‘Recursive Scan-Matching SLAM’. In press, Journal of Robotics and Autonomous Systems, June 2006.
-K. Granstrom, J. Callmer, F. Ramos and J. Nieto. ‘Learning to Detect Loop Closure from Range Data’. Submitted to ICRA 2009.
SLAM with object recognition
-F. Ramos, J. Nieto and H. Durrant-Whyte. ‘Combining Object Recognition and SLAM for Extended Map Representations’. In Proceedings ISER, International Symposium on Experimental Robotics 2006.
-J. Callmer, K. Granstrom, J. Nieto and F. Ramos. ‘Tree of Words for Visual Loop Closure Detection in Urban SLAM’. Submitted to ACRA 2008.
For more details about SLAM, check out Tim Bailey’s webpage which is one of the best resources of information for this topic.

hyperspectral analysis
I’m working in Mineral Mapping using hyperspectral analysis techniques. This is part of the work I do for the Rio Tinto Centre for Mine Automation. The main objective is geology and geometry estimation using vision and laser respectively.
-J. Nieto , D. Viejo, S. Monteiro. `3D Geological Modelling using Laser and Hyperspectral Data’, IEEE IGARSS, International Geoscience and Remote Sensing Symposium, 2010.
-S. Monteiro, R. Murphy, F. Ramos and J. Nieto. ``Applying Boosting for Hyperspectral Classification of Ore-Bearing Rocks''. IEEE MLSP, Machine Learning for Signal Processing, 2009.
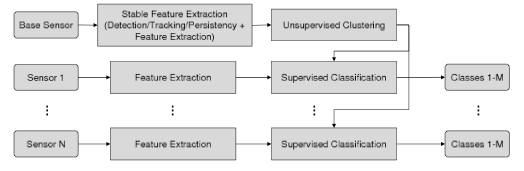
detection and classification of moving objects
This is the main topic of Victor Cano’s thesis and my former student Roman Katz. We have been working in a probabilistic approach for detection, tracking and classification of moving objects.
-R. Katz, J. Nieto and E. Nebot. ‘Probabilistic Scheme for Laser Based Motion Detection’. In Proceedings IEEE IROS, International Conference on Intelligent Robots and Systems, 2008.
-R. Katz, B. Douillard, J. Nieto and E. Nebot. ‘A self-supervised architecture for moving obstacles classification’. In Proceedings IEEE IROS, International Conference on Intelligent Robots and Systems, 2008.
-R. Katz, J. Nieto, E. Nebot and B. Douillard. ‘Track-based self-supervised classification of dynamic obstacles’. Autonomous Robots, 2010.
-R. Katz, J. Nieto and E. Nebot. ‘Unsupervised Classification of Dynamic Objects in Urban Environments’. Accepted for publication, Journal of Field Robotics, 2010.