Project Overview

Benthic marine habitats such as coral reefs, seagrass meadows and kelp forests are environments that have significant economic value worldwide and are expected to face increasing pressures from human impacts such as urban development, fishing and climate change. Long-term monitoring of these habitats provides a means for detecting and quantifying changes in the distribution and abundance of different species, aiding our understanding of human impacts. This project aims to develop algorithms and methods required to enable robotic platforms to perform repeatable, high-resolution surveys of marine habitats. Current research is focussed on developments in data processing of multi-year repeat survey imagery and other map data for precision automatic registration and change detection. Change detection is made challenging by the lack of precise geo-registration accuracy (errors of +/-5m) with respect to cm-level changes that can occur across multiple years in habitats such as coral reefs. Registration of data across multiple years must be performed using the map and image data itself, which is further complicated by changes in the benthic coverage and assemblages that occur over multiple temporal and spatial scales.

The Marine Robotics Group at the Australian Centre for Field Robotics (ACFR) operates an ocean-going Autonomous Underwater Vehicle (AUV) called "Sirius" capable of undertaking high-resolution, geo-referenced surveys which is currently used as part of Australia's Integrated Marine Observing System (IMOS). As part of the IMOS program, Sirius is deployed at several key locations along Australian coastal waters on a yearly basis to perform repeated surveys and collect data which can be used for long-term monitoring. The AUV employs a variety of navigation sensors including Global Positioning Systems (GPS) at the surface and ship-borne Ultra-Short BaseLine (USBL) positioning while underwater to re-localise itself in the same location across multiple years with an accuracy of approximately +/-5m. At each reference site the AUV collects stereo-image pairs, mutli-beam sonar and water column data which is post-processed to produce 3D photo-textured topographic reconstructions of the seafloor along with geo-referenced mosaic maps.
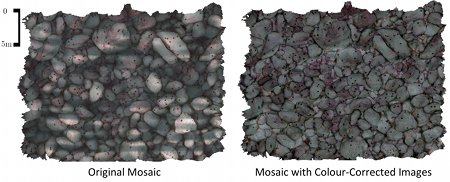
When capturing images underwater, the water column imposes several effects on images that are negligible in air such as colour-dependant attenuation and lighting patterns. These effects cause problems for human interpretation of images and also confound automatic change analysis techniques. Research is focussing on exploiting the 3D structure of the scene generated using structure-from-motion techniques to correct for effects such a distance-based attenuation, vignetting and lighting pattern, improving the consistency of imagery and photo-textured 3D models.

Registration of map data and images across multiple years is complicated by changes in the benthic coverage and assemblages that occur over multiple temporal and spatial scales. Recent research is studying new methods for accurate and robust registration of imagery mosaics collected over multiple years using techniques such as mutual information optimisation. These methods provide robustness to changes in the colour and brightness of objects in an underwater scene. Results are presented from field data collected over coral reefs near the Abrolhos Islands in Western Australia between 2010 and 2011. Coral in the area exhibited signs of bleaching between the years, and the registration techniques were able to accurately co-align images in the face of these changes.
Project People: Mitch Bryson, Matthew Johnson-Roberson, Oscar Pizarro and Stefan Williams (program leader)
R. Ferrari, M. Bryson, T. Bridge, J. Hustache, S.B. Williams, M. Byrne and W. Figueira, "Quantifying the response of structural complexity and community composition to environmental change in marine communities", Global Change Biology, vol. 22, pp. 1965-1975, 2016. [online]
M. Bryson, M. Johnson-Roberson, O. Pizarro and S. Williams, "True Color Correction of Autonomous Underwater Vehicle Imagery", To appear in Journal of Field Robotics, DOI 10.1002/rob.21638, 2015. [online]
M. Bryson, M. Johnson-Roberson, O. Pizarro and S. Williams, "Automated Registration for Multi-year Robotic Surveys of Marine Benthic Habitats", IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, Japan, November 2013.
M. Bryson, M. Johnson-Roberson, O. Pizarro and S. Williams, "Repeatable Robotic Surveying of Marine Benthic Habitats for Monitoring Long-term Change", Workshop on Robotics for Environmental Monitoring at Robotics: Science and Systems, Sydney, Australia, July 2012. [pdf]
M. Bryson, M. Johnson-Roberson, O. Pizarro and S. Williams, "Colour-Consistent Structure-from-Motion Models using Underwater Imagery", Robotics: Science and Systems (RSS), Sydney, Australia, July 2012. [pdf]
This project is supported through a Linkage Grant with Thales Australia and the Australian Research Council (ARC). IMOS is supported through the Department of Innovation, Industry, Science and Research (DIISR) National Collaborative Research Infrastructure Scheme. Follow the link for further information about related AUV projects and research within the Marine Robotics group at the Australian Centre for Field Robotics, University of Sydney.