Current Projects
I'm currently involved in a range of projects that explore the potential of robotics, computer vision, 3D reconstruction, hyperspectral imaging and low-cost sensor fusion in applications including marine science, ecology, forestry and agriculture. I'm involved in projects as part of the Marine Robotics and Aerial Robotics groups within the Australian Centre for Field Robotics, and collaborate with researchers from the NSW Department of Primary Industries, University of Tasmania, School of Geosciences and School of Life and Environmental Sciences at the University of Sydney.

Computer Vision and Airborne LiDAR in Forestry
This project aims to develop new methods for quantifying timber resources over plantation forests using imagery and high-spatial resolution lidar data collected by manned aircraft and UAVs. We are currently developing new 3D pointcloud processing techniques for individual tree detection, segmentation and assessment using aerially-acquired, dense pointcloud datasets and exploring the use of high-resolution UAV-borne imagery for quantifying residues and coarse woody debris left over after harvesting operations. The project is using state-of-the-art techniques in robotics, computer vision and 3D perception to manage the challenges of working over large-scales sites (tens of thousands of hectares) in an accurate and efficient way.
This project is supported by Forest and Wood Products Australia and performed in collaboration with researchers at Forest Science Group, NSW Department of Primary Industries and the University of Tasmania.
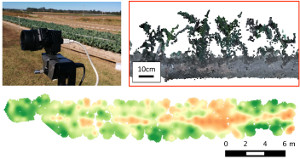
Low-cost Thermal and Hyperspectral Imaging in Agriculture
This project aims to develop novel low-cost means of acquiring vision, hyperspectral and thermal imagery maps for use in agri-food applications. We are developing a low-cost, low-weight sensor platform integrating visual, hyperspectral and thermal sensors, suitable for deployment by handheld measurement or by using a small UAV. Current research challenges include sensor registration, sensor fusion, spatial positioning and 3D map reconstruction algorithms that combine this data into a system that provides maps of plant biomass, productivity and water/disease stress of crop plots on small-scale farms.
This project is supported through the Mid Career Researcher Development Scheme through the Faculty of Engineering and Information Technologies at the University of Sydney.
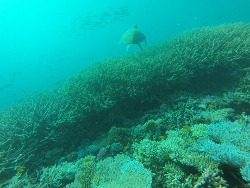
Measuring Coral Reef Structural Complexity using Underwater Imaging Tools
This project aims to develop and assess new techniques for measuring structural complexity and it's change over time in underwater habitats (such as coral reefs) using new tools in robotics, computer vision, structure-from-motion and photogrammetry. We have developed new tools for collecting seafloor imagery, processing imagery to generate high-resolution topographic and photographic maps of the seafloor, tools for measuring data on the structural complexity of habitats at different spatial scales and the composition of the biological community present, and new tools for registering and comparing maps in order to measure changes in an environment over time. Click here for more information.
This project is a collaboration between the Australian Centre for Field Robotics and the School of Life and Environmental Sciences at the University of Sydney. The work is supported by the Great Barrier Reef Foundation, Australian Research Council (ARC) and Australia's Integrated Marine Observing System (IMOS).
Past Projects
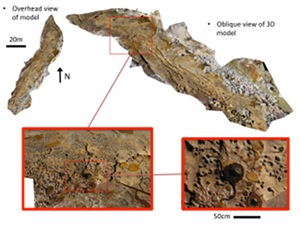
Techniques and Algorithms for Enabling Low-cost, Ultra-high Spatial and Temporal Resolution Mapping
This project aims to develop data collection techniques and data processing algorithms for constructing ultra-high resolution three-dimensional maps of outdoor landscapes. Existing technologies in remote sensing using satellites and aircraft provide data with limited spatial and temporal resolution (via the high-costs of data collection) that limit their effectiveness in small-scale environmental science and ecology studies. This project thus aims to develop low-cost data collection techniques using platforms such as kites and tethered balloons along with novel image-based data fusion algorithms for constructing high resolution 3D landscape maps for use in applications such as island geomorphology and coastal ecology. Click here for more information.
This project is supported through the Early Career Researcher Development Scheme through the Faculty of Engineering and Information Technologies at the University of Sydney.


Autonomous Repeatable Surveys for Long-term Monitoring of Marine Habitats
This project aims to develop algorithms and methods required to enable robotic platforms to perform repeatable, high-resolution surveys of marine habitats. Australia has several on-going strategies and programs focused on the sustainable use of marine resources, which will rely on detecting and quantifying long-term changes in the marine environment. Research is being performed in accurate and robust registration of sensor data collected using an Autonomous Underwater Vehicle (AUV) over benthic habitats across multiple years, and algorithms for automatically quantifying changes in benthic coverage and habitat types. Click here for more information.
This project is supported through a Linkage Grant with Thales Australia and the Australian Research Council (ARC).

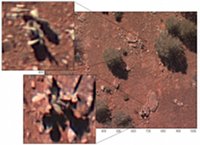
UAV Surveillance Systems for the Management of Woody Weeds
This project focussed on developing a robotic system for autonomous mapping, detection and classification of different woody weed species using a low-cost vision-based sensor payload mounted to an small Unmanned Aerial Vehicle (UAV). Woody weed species such as Prickly Acacia (Acacia nilotica), Mesquite (Prosopis species) and Parkinsonia (Parkinsonia aculeata) are a huge problem in Australia, particularly on agricultural land where they outcompete native vegetation, cause land access and cattle mustering issues and use water resources in grassland and woodland habitats. Click here for more information.
This project was supported under project code B.NBP.0474 through Meat and Livestock Australia (MLA).

Using UAVs and Innovative Classification Algorithms in the Detection of Cacti
This project examined the use of Unmanned Aerial Vehicles (UAV) and computer vision algorithms for the detection and mapping of Wheel Cactus (Opuntia robusta) in rangeland environments. The final project report is available here.
This project was supported under project code AWRC08-04 through the National Weeds and Productivity Research Program.