Project Overview

Habitat structural complexity is one of the most important factors in determining the makeup of organisms which use the habitat, where more structurally-complex habitats typically attract more abundant and diverse biological communities. This project aims to develop and assess new techniques for measuring structural complexity and it's change over time in underwater habitats (such as coral reefs) using new tools in robotics, computer vision, structure-from-motion and photogrammetry. We have developed new tools for collecting seafloor imagery, processing imagery to generate high-resolution topographic and photographic maps of the seafloor, tools for measuring data on the structural complexity of habitats at different spatial scales and the composition of the biological community present, and new tools for registering and comparing maps in order to measure changes in an environment over time.
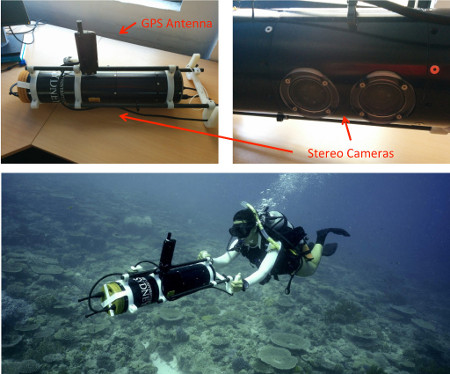
The Marine Robotics Group at the Australian Centre for Field Robotics (ACFR) operates an ocean-going Autonomous Underwater Vehicle (AUV) called "Sirius" capable of undertaking high-resolution, geo-referenced surveys which is currently used as part of Australia's Integrated Marine Observing System (IMOS). The group also operates a diver-operated stereo camera rig (known as the 'diver-rig') which is capable of collecting stereo imagery and other associated sensor data (GPS, depth, tilt and magnetic heading data). This data is then used to reconstruct 3D photo-textured maps of the seafloor using techniques in SLAM, structure-from-motion and photogrammetry.
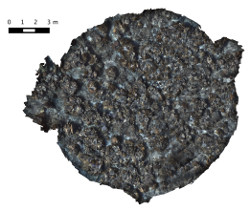
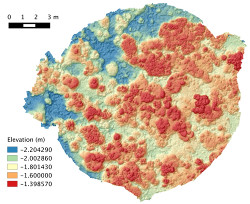
The generated 3D topographic surface models of the benthos can then be used to calculate various indices of structural complexity such as rugosity. The generation of 3D models allows for the spatial resolution of complexity measurements (equivalent to the link size in traditional chain-and-tape methods) to be easily controlled and varied, which is important for comparing measurements over time and for understanding the implications of complexity to organisms of differing body sizes.
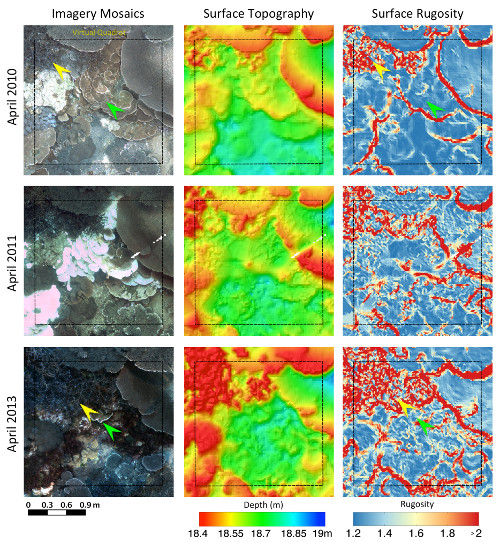
We have used repeated structural complexity measurements derived from 3D models from AUV dives over coral reefs in the Abrolhos Islands, Western Australia to track changes following a marine heatwave and bleaching event in 2011. The techniques developed in this project were used to precisely measure changes in habitat complexity changes over three years after the bleaching event and relate this to changes in the dominance in differing coral morphologies during the reef's recovery. The use of novel data fusion and registration techniques developed in this project meant changes could be measured at an un-precedented scale and degree of precision.
In recent work, we have established quantifications of the accuracy and repeatability of structural complexity measurements using underwater photogrammetry, including the relationships between accuracy, imaging conditions (such as ambient light and water clarity), survey parameters and the morphological types of the coral communities under investigation.
Project People: Mitch Bryson, Renata Ferrari, Tom Bridge, Will Figuiera, Oscar Pizarro, Josh Madin, Stefan Williams, Maria Byrne.
M. Bryson, R. Ferrari, W. Figueira, O. Pizarro, J. Madin, S. Williams and M. Byrne, "Characterisation of measurement errors using structure-from-motion and photogrammetry to measure marine habitat structural complexity", Ecology and Evolution (early view), DOI 10.1002/ece3.3127, 2017. [online]
R. Ferrari, M. Bryson, T. Bridge, J. Hustache, S.B. Williams, M. Byrne and W. Figueira, "Quantifying the response of structural complexity and community composition to environmental change in marine communities", Global Change Biology, vol. 22, pp. 1965-1975, 2016. [online]
T. Bridge, R. Ferrari, M. Bryson, R. Hovey, W. Figueira, S. Williams, A. Harborne and M. Byrne, "Variable Responses of Benthic Communities to Anomalously Warm Sea Temperatures on a High-Latitude Coral Reef", PLoS ONE 9(11): e113079. doi:10.1371/journal.pone.0113079, 2014.
This project is a collaboration between the Australian Centre for Field Robotics and the School of Life and Environmental Sciences at the University of Sydney. The work is funded by the Great Barrier Reef Foundation's Resilient Coral Reefs Successfully Adapting to Climate Change research and development program in collaboration with the Australian Government. Additional support was provided by The Australian Research Council (ARC) and Australia's Integrated Marine Observing System (IMOS), funded by the Department of Innovation, Industry, Science and Research through the National Collaborative Research Infrastructure Scheme and the Education Investment Fund.
Follow the link for further information about related AUV projects and research within the Marine Robotics group at the Australian Centre for Field Robotics, University of Sydney.