Research
High Resolution 3D Vision-Based Landscape Mapping and Reconstruction
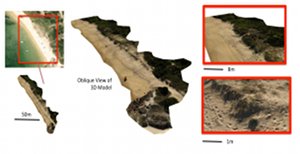
This research area focuses on algorithms for multi-sensor data fusion and 3D map reconstruction using sensor data (primarily colour imagery) collected from robotic platforms such as UAVs and AUVs. Robotic platforms such as UAVs provide a unique sensor perspective for environmental mapping through the ability for precise low-altitude flight. Owing to the often small size of UAVs (compared to manned aircraft) and the low-cost nature of a wide range of applications in environmental monitoring, vision cameras are an ideal sensor. This research thus focuses on building accurate, large-scale and high-resolution, 3D maps of unstructured terrestrial and underwater environments using vision as a primary sensor.


Change Detection and Temporal Modelling in Environmental Mapping
This research area focuses on using multi-temporal mapping in unstructured environments for detecting and quantifying changes in structure and appearance over time. Multi-temporal mapping can be used to record changes in benthic coverage and habitat type in marine environments or vegetation coverage and coverage changes with invasive flora (such as weeds) in terrestrial environments and is of importance to understanding the effects of land use, human impacts on the environment and global warming. The technical challenges in this work include accurate and robust registration of map data and imagery over large time scales and in environments where global navigation information is unavailable (such as in underwater environments), and the modelling and distinction of significant change versus regular and insignificant dynamic processes or changes in perceived sensor data induced by different imaging conditions.


Unmanned Platforms for Remote Sensing and Mapping
Monitoring of large areas of terrestrial and underwater environments relies on routine map building and picture compilation, traditionally performed using high-flying surveys with manned-aircraft, through satellite remote sensing or ship-bourne sonar bathymetry. Autonomous platforms such and UAVs and AUVs provide a unique perspective on the environment, venturing to depths and close proximity to terrains that are unsafe for manned platforms, providing rich levels of detail, with the potential for high endurance/persistent mapping. UAVs and AUVs also provide the potential for intelligent autonomous data collection systems, that can make decisions in real-time on how to best survey areas and seek out the best data, driven by higher-level mission goals.