Project Overview

This project focussed developing a robotic system for autonomous mapping, detection and classification of different woody weed species using a low-cost vision-based sensor payload mounted to an small Unmanned Aerial Vehicle (UAV). Woody weed species such as Prickly Acacia (Acacia nilotica), Mesquite (Prosopis species) and Parkinsonia (Parkinsonia aculeata) are a huge problem in Australia, particularly on agricultural land where they outcompete native vegetation, cause land access and cattle mustering issues and use water resources in grassland and woodland habitats.

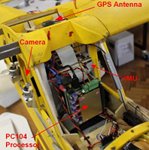
A fixed-wing UAV system was used to collect 3-band colour imagery and on-board IMU/GPS navigation information at low altitude over small areas of farmland. Typical high-flying manned aerial surveys or satellite remote sensing provides spatial resolutions of 0.5-1m at best, whereas our UAV system was able to fly at low altitudes (~100m from the ground) safely using an autonomous control system allowing for imagery with a spatial resolution of 3cm per pixel. The resolution in this imagery allows autonomous image interpretation that can use not only spectral response and colour but also the texture and 3D structure of vegetation to help discriminate between weed species and native species in the sensor data.

Post-processing of the collected data was used to build 3D photographic models of the landscape and machine learning/computer vision algorithms were developed to autonomously detect and classify vegetation in the photographic maps into a number of different species of invasive weeds and native vegetation.
Project Team: Mitch Bryson, Jeremy Randle, Ali Goktogan, Steve Keep, Esa Attia, Alistair Reid, Calvin Hung, Nick Lawrence, Zhe Xu, Prasad Hemakumara and Salah Sukkarieh (program leader).
C. Hung, M. Bryson and S. Sukkarieh, "Multi-class predictive template for tree crown detection", ISPRS Journal of Photogrammetry and Remote Sensing, vol. 68, pp. 170-183, 2012.
M. Bryson, A. Reid, F. Ramos and S. Sukkarieh, "Airborne Vision-based Mapping and Classification of Large Farmland Environments", Journal of Field Robotics, Special Issue on Visual Mapping and Navigation Outdoors, vol. 27, no. 5, pp. 632-655, 2010. [pdf]
C. Hung, M. Bryson and S. Sukkarieh, "`ShadowCut' - An Unsupervised Object Segmentation Algorithm for Aerial Robotic Surveillance Applications", IEEE International Conference on Robotics & Automation (ICRA), St. Paul, USA, 2012.
M. Bryson and S. Sukkarieh, "A Comparison of Feature and Pose-Based Mapping using Vision, Inertial and GPS on a UAV", IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), San Francisco, USA, 2011.
M. Bryson, A. Reid, C. Hung, F. Ramos and S. Sukkarieh, "Cost-Effective Mapping using Unmanned Aerial Vehicles in Ecology Monitoring Applications", 12th International Symposium on Experimental Robotics (ISER), Delhi, India, 2010.
This project was supported under project code B.NBP.0474 through Meat and Livestock Australia (MLA). Follow the link for further information about related UAV projects and research within the Aerial Robotics and Aerospace Systems group at the Australian Centre for Field Robotics, University of Sydney.